ROS七轴协作机械臂
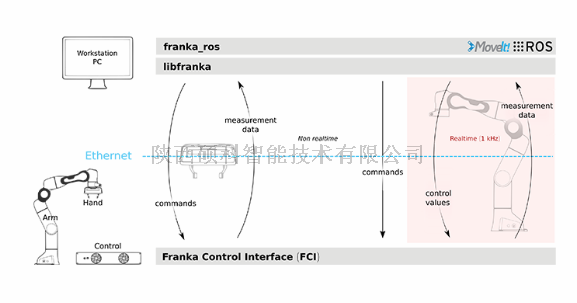
高精度轻型机器人,它同时兼顾研究与应用,为了应对研究需要,提供开源接口(FCI),用户可通过 C++ 和 ROS 进行编程。该系统灵敏度高,针对大多数重复且单调的操作,如精细控制的装配、旋拧和连接以及测试、检查和组装,率先实现了完全自动化。(FCI)提供了用户与机器人之间的一种快速、直接的底层双向通讯接口。用户通过FCI能获取机器人的当前状态,同时可通过以太网连接的外部工作站直接控制机器人。 Research app包是模块化的机器人应用程序,每个程序代表机器人任务的一部分步骤。用户可以轻松地在桌面上将这些应用程序进行参数化,以形成整个自动化任务。当在桌面中选择时,每个应用程序都会打开一个菜单,以交互的方式引导用户完成整个流程。

产品特点:
支持ROS: 提供FCI作为ROS的接口,同时它也是MoveIt! 教程中使用的指定机械臂,满足ROS下MoveIt! 的使用。高精度高性能:0.1毫米级的重复定位精度,3公斤负载的七自由度机械臂,末端速度可达2m/s,优秀的人机交互界面:拥有简单易用的编程系统,无需专业知识即可轻松部署各种任务,同时提供丰富的app软件包,并支持移动设备控制机械臂,七轴均内置扭矩传感器:七自由度的设计可以使它如人手臂一样灵活,同时各个关机均内置扭矩传感器,可实时反馈高质量扭矩信号,并进行扭矩控制。

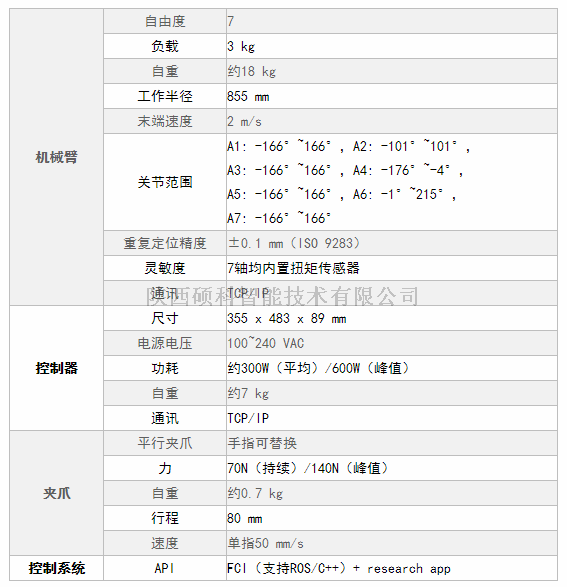
产品参数: